In the ever-evolving field of robotics, we've witnessed significant advancements in the software that controls robots. However, there's a notable lag in enhancing the physical aspects of robots, such as their bodies and mechanics. This discrepancy hinders robots from achieving the agility and dexterity comparable to humans and animals.
My research focuses on a fundamental aspect of robotics – the design and structure of robots themselves. I explore how a robot's morphologies, like its shape, size, kinematic types, and materials, impact its capabilities. By delving into these intricacies, I aim to pioneer innovative breakthroughs that empower robots to excel in tasks that currently challenge them. In essence, my work seeks to bridge the gap between the current limitations of robots and the intricate tasks they're meant to accomplish.
Click on the large image or scroll down for more information on the projects. See publication for detailed report.
My research focuses on a fundamental aspect of robotics – the design and structure of robots themselves. I explore how a robot's morphologies, like its shape, size, kinematic types, and materials, impact its capabilities. By delving into these intricacies, I aim to pioneer innovative breakthroughs that empower robots to excel in tasks that currently challenge them. In essence, my work seeks to bridge the gap between the current limitations of robots and the intricate tasks they're meant to accomplish.
Click on the large image or scroll down for more information on the projects. See publication for detailed report.
Scaling Analysis of Dynamic Robots (in-prep)
This paper takes a step toward simultaneous actuator and structure scaling by examining the interaction of three different actuator technologies with three different styles of structural design for the task of dynamical legged locomotion across an order of magnitude variation in length scales.
DOQ: Dynamic Origami Quadruped (in-prep)
The project focus on utilising the kinegami algorithm to help build origami quadrupedal robots that can perform dynamic tasks.
Kinegami
An algorithm that generates from a specification of a serial robot a kinematically equivalent origami mechanism
|
|
Origami processes can generate both rigid and compliant structures from the same homogeneous sheet material. We advance the origami robotics literature by showing how to construct a complete rigid kinematic chain with prescribed joint compliance from a single tubular sheet. Our “Kinegami” algorithm accepts a Denavit-Hartenberg specification and uses a catalogue of origami modules to generate a crease pattern that folds into a serial robot mechanism realizing the prescribed kinematics.
See <Github> for the algorithm. |
REBO Juggler/Hopper
A Vertical Juggling Robot and a 2 DOF Dextrous Hopping Robot with Programmably Compliant Origami Mechanism
|
|
We present an approach to overcoming challenges in dynamical dexterity for robots through programmably compliant origami mechanisms. Our work leverages a one-parameter family of flat sheet crease patterns that folds into origami bellows, whose axial compliance can be tuned to select desired stiffness. The origami springs can sustain high power throughput, enabling the robot to achieve asymptotically stable juggling for both highly elastic (1 kg resilient shotput ball) and highly damped (“medicine ball”) collisions in the vertical direction with apex heights approaching 10 cm. The results demonstrate that “soft” robotic mechanisms are able to perform a controlled, dynamically actuated task.
|
|
|
We report on experiments with a paper origami robot (0.23m, 2.53kg) that exhibits highly dynamic and stable two degree-of-freedom hopping at speeds in excess of 1.5 bodylengths per second while achieving aerial phase apex states 25% above the stance height over thousands of cycles. Three conventional brushless DC motors load energy into the folded paper springs through pulley-borne cables whose sudden loss of tension upon touchdown triggers the release of spring potential that accelerates the body back through liftoff to flight with a 20W powerstroke, whereupon the toe angle is adjusted to regulate fore-aft speed. We also demonstrate in the vertical hopping mode the transparency of this actuation scheme by using proprioceptive contact detection with only motor encoder sensing. The combination of actuation and sensing shows potential to lower system complexity for tendon-driven robots.
|
TurboQuad
A Rapid Leg-Wheel Transformable Quadruped with Bio-inspired Controlling Structure
IEEE ICRA Best Video Award Finalist 2014
Application of the Year Award in Graphical System Design Award, National Instruments Taiwan, 2013
|
|
Environment full of unknown is a factor one must not neglect when designing mobile robot. Since the terrain nowadays is a mixture of natural terrain (ex: grass, mud, etc) and artificial terrain (ex: stair, road, etc), designing a robotic platform that can operate on both categories may be a trend, and the ability to adapt to different environment becomes a crucial designing goal. We introduce a novel leg-wheel transformable quadruped TurboQuad, which could adapt to mixed terrain by transforming into different modes, while performing smooth transition. The robot is implemented with specialized mechanisms that allow the morphology of the limbs to change between wheels and legs. On the other hand, a bio-inspired control structure based on the Central Pattern Generator and coupled oscillators networks is adopted to generate smooth trajectories.
|
Quattroped
A Leg-Wheel Transformable Quadruped
|
|
I joined the Bio-Inspired Robotic Lab directed by Professor Pei-Chun Lin and took part in the Quattruped
project started by my antecessor, a leg-wheel transformable robot with specialized transformable limb mechanism and the finite state machine. Using carefully arranged actuators, the robot can be driven by the same set of motors in both wheeled mode and legged mode, to enjoy the advantages of wheels on flat ground and employ the mobility of legs on rough terrain. I modeled the system through both Newton-Euler and Lagrangian methods to compare the characteristics of energy consumption and specific resistance of both legged and wheeled motions. As expected, wheels provide a smoother ride with better power efficiency, while legs the mobility for rough terrain. This ac
|
Omnicron
The 2nd Generation Omnidirectional Spherical Robot
|
|
With the desire of developing a spherical robot with full 3-DOF omnidirectional mobility, spherical robot Omnicron was born. Instead of using a single driven ball as in OmniQiu, the robot utilizes three omnidirectional wheels to drive the spherical shell. Three wheels are controlled independently, thus achieving 3-DOF planar locomotion by simple 3 to 3 mapping. Among all the spherical robots, to the best of our knowledge, Omnicron is the only singularity-free omnidirectional robot with 3-DOF mobility. Omnicron is tested under a camera system to analyse its dynamics, where LED inside the robot provide us enough light contrast for image processing. It also makes a great night light.
|
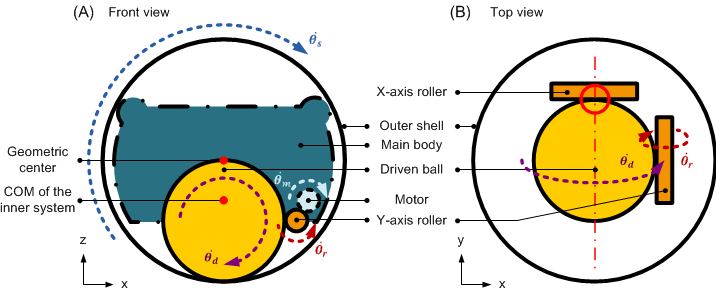
OmniQiu
A 2 Degree-of-freedom Omnidirectional Spherical Robot
College Student Research Creativity Award, Ministry of Science and Technology, Taiwan, 2011
|
A spherical robot is a special type of mobile robot that has recently received significant attention. The special morphology of the robot has several advantages over a traditional wheeled or legged robot: (i) the completely-covered outer shell protects the whole system; (ii) the motion resembles wheeled locomotion with great power efficiency and motion smoothness; (iii) the motion can be omnidirectional, owing to its intrinsic nature of geometrical symmetry; (iv) every portion of the outer shell can act as a “foot,” which allows fast collision recovery and automatic contact adapting to soft/uneven terrains and other conditions.
|
